¿Está buscando una herramienta de extremo de brazo que pueda recoger, mantener en posición, transferir, voltear y colocar piezas de acero de diversas formas, tamaños y pesos? Lo más importante es que la pinza del robot debe poder soportar las altas temperaturas en la línea de soldadura. Bueno, aquí es donde entra en juego la
pinza magnética.
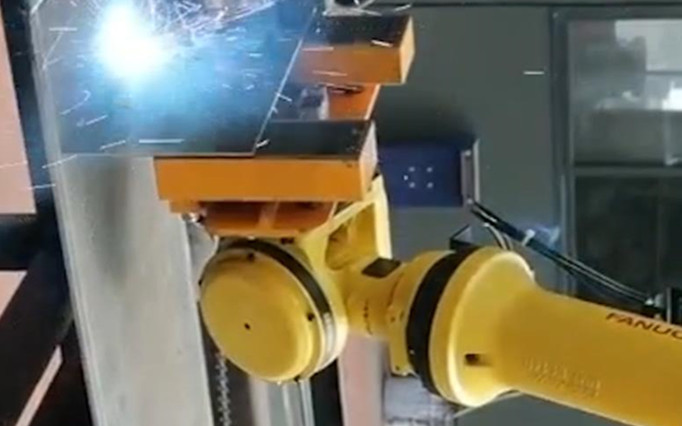
Lo que NO se muestra en la imagen es que la pinza magnética instalada en el brazo robótico, primero agarró láminas de metal mecanizadas de una línea transportadora y luego las transfirió a la siguiente línea de ensamblaje para alimentar al robot de soldadura. Esta pinza para brazo robótico fue diseñada y fabricada por HVR MAG, según las solicitudes de aplicación del cliente. Además del movimiento normal de recogida y colocación, también es adaptable a un giro de 360 grados para soldadura de varias piezas.
Este imán de herramientas de extremo del brazo ayudó a aumentar la eficiencia en el manejo de láminas para soldaduras precisas y de varias partes para la fábrica. Una pinza de brazo robótico, para piezas de acero de diferentes especificaciones, puede ser más económica que comprar diferentes efectores finales y sumar el tiempo relacionado con los cambios. Ya que no hay necesidad de un cambio constante de herramientas finales, y esto hace que la línea de producción sea más eficiente.
En términos de la capacidad de retención de la pinza magnética, HVR MAG puede diseñarla desde varios kilogramos hasta varios cientos de kilogramos, de acuerdo con los requisitos de su aplicación.
Contáctenos para obtener una pinza magnética personalizada para manipular piezas de acero con diferentes tamaños y formas en su proceso de fabricación industrial automatizado.